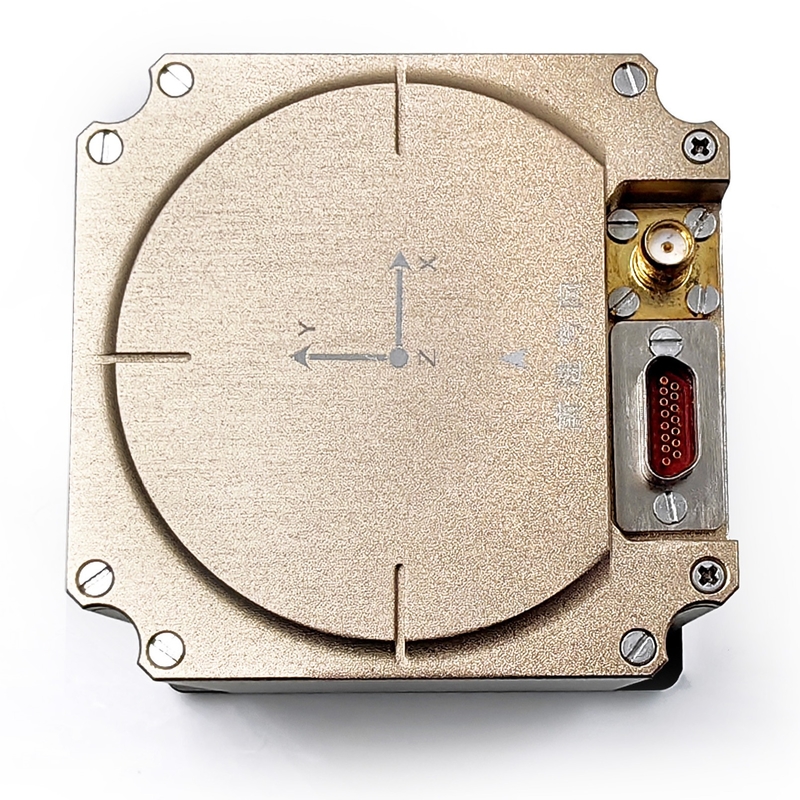
INS-100 is a high-precision integrated navigation system. It is equipped with three self-developed 40 fiber optic gyroscopes,three-self MEMS accelerometers and GNSS modules, and realizes high-precision positioning and navigation in complex environments through multi-sensor fusion and integrated navigation algorithm. The product has high reliability and strong environmental adaptability. The products can be widely used in intelligent driving, UAV, surveying and mapping, marine compass, stable platform, photoelectric pod, underwater vehicle and other fields.
Main functions of the integrated navigation system are as follows:
1. The initial alignment function is completed by using the output of the inertial device, and the shaking base alignment and the moving alignment can be carried out;
2. The GPS information received from outside can be used to complete the integrated navigation function and output information such as angle, speed and position.
3. After the satellite signal is lost, the inertial device output and the odometer input can be used to continue the navigation calculation;
4. It can output high performance and high sampling rate gyro raw output and add raw data for stable platform control.
5. The program and configuration parameters can be upgraded online through the serial port.
Technical Parameter
Gyro technology
Project
Indicators
Remark
Gyro
Measuring range
-300°/s ~+300°/s
Resolution
≤0.5°/h
Bias residual
-1.0°/h ~+1.0°/h
Random walk
0.05 o / h
Bias stability at room temperature
≤0.3°/h(1σ)
10 seconds smoothing, 1h test result
Bias stability at full temperature
≤0.5°/h(1σ)
10 seconds smoothing, 1h test result
Normal-temperature Bias repeatability
≤0.3°/h(1σ)
Statistics of 6 test data
Bias repeatability at full temperature
≤0.5°/h(1σ)
Take 2 Biasdata at full temperature, high temperature, low temperature and normal temperature respectively
Scale factor nonlinearity
≤200ppm
Full temperature and constant temperature
Scale factor repeatability
≤200ppm(1σ)
Full temperature and constant temperature
Gyro start time
≤5s
Gyro bandwidth
300Hz
Design assurance, batch testing
Installation error residual of three-axis gyroscope
≤30"
Accelerometer technical indicators
Project
Indicators
Remark
Acceleration
Measuring range
-50g ~ +50g
Design and selection guarantee
Scale factor nonlinearity
≤200ppm
Design and selection guarantee
Bias stability at full temperature
≤100ug(1σ)
10 seconds smoothing, 1H test result
Bias repeatability at full temperature
≤100ug(1σ)
Take 2 Biasdata at full temperature, high temperature, low temperature and normal temperature respectively
Scale factor repeatability
≤100ppm(1σ)
Design and selection guarantee
Random walk
≤0.02m/s/h1/2
Add up the starting time
≤5s
Triaxial addition installation error residual
≤30"
Alignment accuracy
Project
Indicators
Remark
Alignment accuracy
North seeking time
≤5min
Generally, the standard is 3min or 5min.
Heading Angle Alignment Repeatability
≤1°/cosL
1σ
Pitch Alignment Repeatability
≤0.05°
1σ
Roll Angle Alignment Repeatability
≤0.05°
1σ
North-seeking mode
Optional
It can realize swaying base alignment, GPS auxiliary alignment during travel, odometer auxiliary alignment during travel and main
inertial navigation transfer alignment.
It can realize swaying base alignment, GPS auxiliary alignment during travel, odometer auxiliary alignment during travel and main
inertial navigation transfer alignment.
Inertial navigation accuracy (invalid satellite)
Project
Indicators
Remark
Inertial navigation accuracy
Accuracy of course angle maintenance
≤2°/h
Pitch Angle Holding Accuracy
≤0.2°/h
Accuracy of roll angle maintenance
≤0.2°/h
Pure inertial positioning accuracy
≤20m(100s)
CEP, without external information assistance
Position positioning accuracy of odometer integrated navigation
≤ 0.2% (mileage greater than 3 km)
Position positioning accuracy of odometer integrated navigation